| <!--- Licensed to the Apache Software Foundation (ASF) under one --> |
| <!--- or more contributor license agreements. See the NOTICE file --> |
| <!--- distributed with this work for additional information --> |
| <!--- regarding copyright ownership. The ASF licenses this file --> |
| <!--- to you under the Apache License, Version 2.0 (the --> |
| <!--- "License"); you may not use this file except in compliance --> |
| <!--- with the License. You may obtain a copy of the License at --> |
| |
| <!--- http://www.apache.org/licenses/LICENSE-2.0 --> |
| |
| <!--- Unless required by applicable law or agreed to in writing, --> |
| <!--- software distributed under the License is distributed on an --> |
| <!--- "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY --> |
| <!--- KIND, either express or implied. See the License for the --> |
| <!--- specific language governing permissions and limitations --> |
| <!--- under the License. --> |
| |
| |
| # Fine-tuning an ONNX model with MXNet/Gluon |
| |
| Fine-tuning is a common practice in Transfer Learning. One can take advantage of the pre-trained weights of a network, and use them as an initializer for their own task. Indeed, quite often it is difficult to gather a dataset large enough that it would allow training from scratch deep and complex networks such as ResNet152 or VGG16. For example in an image classification task, using a network trained on a large dataset like ImageNet gives a good base from which the weights can be slightly updated, or fine-tuned, to predict accurately the new classes. We will see in this tutorial that this can be achieved even with a relatively small number of new training examples. |
| |
| |
| [Open Neural Network Exchange (ONNX)](https://github.com/onnx/onnx) provides an open source format for AI models. It defines an extensible computation graph model, as well as definitions of built-in operators and standard data types. |
| |
| In this tutorial we will: |
| |
| - learn how to pick a specific layer from a pre-trained .onnx model file |
| - learn how to load this model in Gluon and fine-tune it on a different dataset |
| |
| ## Pre-requisite |
| |
| To run the tutorial you will need to have installed the following python modules: |
| - [MXNet > 1.1.0](http://mxnet.incubator.apache.org/install/index.html) |
| - [onnx](https://github.com/onnx/onnx) |
| - matplotlib |
| |
| We recommend that you have first followed this tutorial: |
| - [Inference using an ONNX model on MXNet Gluon](https://mxnet.incubator.apache.org/tutorials/onnx/inference_on_onnx_model.html) |
| |
| |
| ```python |
| import json |
| import logging |
| import multiprocessing |
| import os |
| import tarfile |
| |
| logging.basicConfig(level=logging.INFO) |
| |
| import matplotlib.pyplot as plt |
| import mxnet as mx |
| from mxnet import gluon, nd, autograd |
| from mxnet.gluon.data.vision.datasets import ImageFolderDataset |
| from mxnet.gluon.data import DataLoader |
| import mxnet.contrib.onnx as onnx_mxnet |
| import numpy as np |
| |
| %matplotlib inline |
| ``` |
| |
| |
| ### Downloading supporting files |
| These are images and a vizualisation script: |
| |
| |
| ```python |
| image_folder = "images" |
| utils_file = "utils.py" # contain utils function to plot nice visualization |
| images = ['wrench.jpg', 'dolphin.jpg', 'lotus.jpg'] |
| base_url = "https://raw.githubusercontent.com/dmlc/web-data/master/mxnet/doc/tutorials/onnx/{}?raw=true" |
| |
| |
| for image in images: |
| mx.test_utils.download(base_url.format("{}/{}".format(image_folder, image)), fname=image,dirname=image_folder) |
| mx.test_utils.download(base_url.format(utils_file), fname=utils_file) |
| |
| from utils import * |
| ``` |
| |
| ## Downloading a model from the ONNX model zoo |
| |
| We download a pre-trained model, in our case the [GoogleNet](https://arxiv.org/abs/1409.4842) model, trained on [ImageNet](http://www.image-net.org/) from the [ONNX model zoo](https://github.com/onnx/models). The model comes packaged in an archive `tar.gz` file containing an `model.onnx` model file. |
| |
| |
| ```python |
| base_url = "https://s3.amazonaws.com/download.onnx/models/opset_3/" |
| current_model = "bvlc_googlenet" |
| model_folder = "model" |
| archive_file = "{}.tar.gz".format(current_model) |
| archive_path = os.path.join(model_folder, archive_file) |
| url = "{}{}".format(base_url, archive_file) |
| onnx_path = os.path.join(model_folder, current_model, 'model.onnx') |
| |
| # Download the zipped model |
| mx.test_utils.download(url, dirname = model_folder) |
| |
| # Extract the model |
| if not os.path.isdir(os.path.join(model_folder, current_model)): |
| print('Extracting {} in {}...'.format(archive_path, model_folder)) |
| tar = tarfile.open(archive_path, "r:gz") |
| tar.extractall(model_folder) |
| tar.close() |
| print('Model extracted.') |
| ``` |
| |
| ## Downloading the Caltech101 dataset |
| |
| The [Caltech101 dataset](http://www.vision.caltech.edu/Image_Datasets/Caltech101/) is made of pictures of objects belonging to 101 categories. About 40 to 800 images per category. Most categories have about 50 images. |
| |
| *L. Fei-Fei, R. Fergus and P. Perona. Learning generative visual models from few training examples: an incremental Bayesian approach tested on 101 object categories. IEEE. CVPR 2004, Workshop on Generative-Model |
| Based Vision. 2004* |
| |
| |
| ```python |
| data_folder = "data" |
| dataset_name = "101_ObjectCategories" |
| archive_file = "{}.tar.gz".format(dataset_name) |
| archive_path = os.path.join(data_folder, archive_file) |
| data_url = "https://s3.us-east-2.amazonaws.com/mxnet-public/" |
| |
| if not os.path.isfile(archive_path): |
| mx.test_utils.download("{}{}".format(data_url, archive_file), dirname = data_folder) |
| print('Extracting {} in {}...'.format(archive_file, data_folder)) |
| tar = tarfile.open(archive_path, "r:gz") |
| tar.extractall(data_folder) |
| tar.close() |
| print('Data extracted.') |
| ``` |
| |
| |
| ```python |
| training_path = os.path.join(data_folder, dataset_name) |
| testing_path = os.path.join(data_folder, "{}_test".format(dataset_name)) |
| ``` |
| |
| ### Load the data using an ImageFolderDataset and a DataLoader |
| |
| We need to transform the images to a format accepted by the network |
| |
| |
| ```python |
| EDGE = 224 |
| SIZE = (EDGE, EDGE) |
| BATCH_SIZE = 32 |
| NUM_WORKERS = 6 |
| ``` |
| |
| We transform the dataset images using the following operations: |
| - resize the shorter edge to 224, the longer edge will be greater or equal to 224 |
| - center and crop an area of size (224,224) |
| - transpose the channels to be (3,224,224) |
| |
| |
| ```python |
| def transform(image, label): |
| resized = mx.image.resize_short(image, EDGE) |
| cropped, crop_info = mx.image.center_crop(resized, SIZE) |
| transposed = nd.transpose(cropped, (2,0,1)) |
| return transposed, label |
| ``` |
| |
| The train and test dataset are created automatically by passing the root of each folder. The labels are built using the sub-folders names as label. |
| ``` |
| train_root |
| __label1 |
| ____image1 |
| ____image2 |
| __label2 |
| ____image3 |
| ____image4 |
| ``` |
| |
| |
| ```python |
| dataset_train = ImageFolderDataset(root=training_path) |
| dataset_test = ImageFolderDataset(root=testing_path) |
| ``` |
| |
| We use several worker processes, which means the dataloading and pre-processing is going to be distributed across multiple processes. This will help preventing our GPU from starving and waiting for the data to be copied across |
| |
| |
| ```python |
| dataloader_train = DataLoader(dataset_train.transform(transform, lazy=False), batch_size=BATCH_SIZE, last_batch='rollover', |
| shuffle=True, num_workers=NUM_WORKERS) |
| dataloader_test = DataLoader(dataset_test.transform(transform, lazy=False), batch_size=BATCH_SIZE, last_batch='rollover', |
| shuffle=False, num_workers=NUM_WORKERS) |
| print("Train dataset: {} images, Test dataset: {} images".format(len(dataset_train), len(dataset_test))) |
| ``` |
| |
| |
| `Train dataset: 6996 images, Test dataset: 1681 images`<!--notebook-skip-line--> |
| |
| |
| |
| ```python |
| categories = dataset_train.synsets |
| NUM_CLASSES = len(categories) |
| BATCH_SIZE = 32 |
| ``` |
| |
| Let's plot the 1000th image to test the dataset |
| |
| |
| ```python |
| N = 1000 |
| plt.imshow((transform(dataset_train[N][0], 0)[0].asnumpy().transpose((1,2,0)))) |
| plt.axis('off') |
| print(categories[dataset_train[N][1]]) |
| ``` |
| |
| |
| `Motorbikes`<!--notebook-skip-line--> |
| |
| |
| |
| <!--notebook-skip-line--> |
| |
| |
| ## Fine-Tuning the ONNX model |
| |
| ### Getting the last layer |
| |
| Load the ONNX model |
| |
| |
| ```python |
| sym, arg_params, aux_params = onnx_mxnet.import_model(onnx_path) |
| ``` |
| |
| This function get the output of a given layer |
| |
| |
| ```python |
| def get_layer_output(symbol, arg_params, aux_params, layer_name): |
| all_layers = symbol.get_internals() |
| net = all_layers[layer_name+'_output'] |
| net = mx.symbol.Flatten(data=net) |
| new_args = dict({k:arg_params[k] for k in arg_params if k in net.list_arguments()}) |
| new_aux = dict({k:aux_params[k] for k in aux_params if k in net.list_arguments()}) |
| return (net, new_args, new_aux) |
| ``` |
| |
| Here we print the different layers of the network to make it easier to pick the right one |
| |
| |
| ```python |
| sym.get_internals() |
| ``` |
| |
| |
| |
| |
| ```<Symbol group [data_0, pad0, conv1/7x7_s2_w_0, conv1/7x7_s2_b_0, convolution0, relu0, pad1, pooling0, lrn0, pad2, conv2/3x3_reduce_w_0, conv2/3x3_reduce_b_0, convolution1, relu1, pad3, conv2/3x3_w_0, conv2/3x3_b_0, convolution2, relu2, lrn1, pad4, pooling1, pad5, inception_3a/1x1_w_0, inception_3a/1x1_b_0, convolution3, relu3, pad6, .................................................................................inception_5b/pool_proj_b_0, convolution56, relu56, concat8, pad70, pooling13, dropout0, flatten0, loss3/classifier_w_0, linalg_gemm20, loss3/classifier_b_0, _mulscalar0, broadcast_add0, softmax0]>```<!--notebook-skip-line--> |
| |
| |
| |
| We get the network until the output of the `flatten0` layer |
| |
| |
| ```python |
| new_sym, new_arg_params, new_aux_params = get_layer_output(sym, arg_params, aux_params, 'flatten0') |
| ``` |
| |
| ### Fine-tuning in gluon |
| |
| |
| We can now take advantage of the features and pattern detection knowledge that our network learnt training on ImageNet, and apply that to the new Caltech101 dataset. |
| |
| |
| We pick a context, fine-tuning on CPU will be **WAY** slower. |
| |
| |
| ```python |
| ctx = mx.gpu() if mx.context.num_gpus() > 0 else mx.cpu() |
| ``` |
| |
| We create a symbol block that is going to hold all our pre-trained layers, and assign the weights of the different pre-trained layers to the newly created SymbolBlock |
| |
| |
| ```python |
| pre_trained = gluon.nn.SymbolBlock(outputs=new_sym, inputs=mx.sym.var('data_0')) |
| net_params = pre_trained.collect_params() |
| for param in new_arg_params: |
| if param in net_params: |
| net_params[param]._load_init(new_arg_params[param], ctx=ctx) |
| for param in new_aux_params: |
| if param in net_params: |
| net_params[param]._load_init(new_aux_params[param], ctx=ctx) |
| |
| ``` |
| |
| We create the new dense layer with the right new number of classes (101) and initialize the weights |
| |
| |
| ```python |
| dense_layer = gluon.nn.Dense(NUM_CLASSES) |
| dense_layer.initialize(mx.init.Xavier(magnitude=2.24), ctx=ctx) |
| ``` |
| |
| We add the SymbolBlock and the new dense layer to a HybridSequential network |
| |
| |
| ```python |
| net = gluon.nn.HybridSequential() |
| with net.name_scope(): |
| net.add(pre_trained) |
| net.add(dense_layer) |
| ``` |
| |
| ### Loss |
| Softmax cross entropy for multi-class classification |
| |
| |
| ```python |
| softmax_cross_entropy = gluon.loss.SoftmaxCrossEntropyLoss() |
| ``` |
| |
| ### Trainer |
| Initialize trainer with common training parameters |
| |
| |
| ```python |
| LEARNING_RATE = 0.0005 |
| WDECAY = 0.00001 |
| MOMENTUM = 0.9 |
| ``` |
| |
| The trainer will retrain and fine-tune the entire network. If we use `dense_layer` instead of `net` in the cell below, the gradient updates would only be applied to the new last dense layer. Essentially we would be using the pre-trained network as a featurizer. |
| |
| |
| ```python |
| trainer = gluon.Trainer(net.collect_params(), 'sgd', |
| {'learning_rate': LEARNING_RATE, |
| 'wd':WDECAY, |
| 'momentum':MOMENTUM}) |
| ``` |
| |
| ### Evaluation loop |
| |
| We measure the accuracy in a non-blocking way, using `nd.array` to take care of the parallelisation that MXNet and Gluon offers. |
| |
| |
| ```python |
| def evaluate_accuracy_gluon(data_iterator, net): |
| num_instance = 0 |
| sum_metric = nd.zeros(1,ctx=ctx, dtype=np.int32) |
| for i, (data, label) in enumerate(data_iterator): |
| data = data.astype(np.float32).as_in_context(ctx) |
| label = label.astype(np.int32).as_in_context(ctx) |
| output = net(data) |
| prediction = nd.argmax(output, axis=1).astype(np.int32) |
| num_instance += len(prediction) |
| sum_metric += (prediction==label).sum() |
| accuracy = (sum_metric.astype(np.float32)/num_instance) |
| return accuracy.asscalar() |
| ``` |
| |
| |
| ```python |
| %%time |
| print("Untrained network Test Accuracy: {0:.4f}".format(evaluate_accuracy_gluon(dataloader_test, net))) |
| ``` |
| |
| `Untrained network Test Accuracy: 0.0192`<!--notebook-skip-line--> |
| |
| |
| |
| ### Training loop |
| |
| |
| ```python |
| val_accuracy = 0 |
| for epoch in range(5): |
| for i, (data, label) in enumerate(dataloader_train): |
| data = data.astype(np.float32).as_in_context(ctx) |
| label = label.as_in_context(ctx) |
| |
| if i%20==0 and i >0: |
| print('Batch [{0}] loss: {1:.4f}'.format(i, loss.mean().asscalar())) |
| |
| with autograd.record(): |
| output = net(data) |
| loss = softmax_cross_entropy(output, label) |
| loss.backward() |
| trainer.step(data.shape[0]) |
| |
| nd.waitall() # wait at the end of the epoch |
| new_val_accuracy = evaluate_accuracy_gluon(dataloader_test, net) |
| print("Epoch [{0}] Test Accuracy {1:.4f} ".format(epoch, new_val_accuracy)) |
| |
| # We perform early-stopping regularization, to prevent the model from overfitting |
| if val_accuracy > new_val_accuracy: |
| print('Validation accuracy is decreasing, stopping training') |
| break |
| val_accuracy = new_val_accuracy |
| ``` |
| |
| `Epoch 4, Test Accuracy 0.8942307829856873`<!--notebook-skip-line--> |
| |
| |
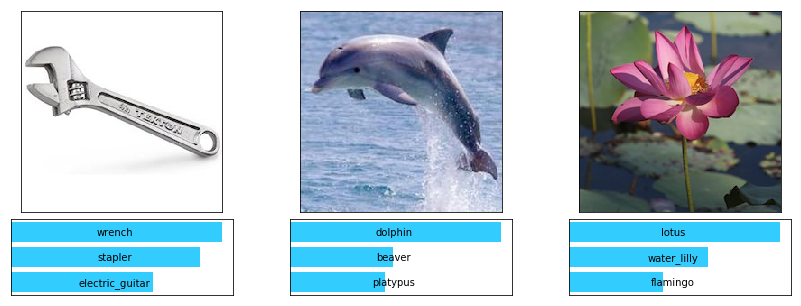
| ## Testing |
| In the previous tutorial, we saw that the network trained on ImageNet couldn't classify correctly `wrench`, `dolphin`, `lotus` because these are not categories of the ImageNet dataset. |
| |
| Let's see if our network fine-tuned on Caltech101 is up for the task: |
| |
| |
| ```python |
| # Number of predictions to show |
| TOP_P = 3 |
| ``` |
| |
| |
| ```python |
| # Convert img to format expected by the network |
| def transform(img): |
| return nd.array(np.expand_dims(np.transpose(img, (2,0,1)),axis=0).astype(np.float32), ctx=ctx) |
| ``` |
| |
| |
| ```python |
| # Load and transform the test images |
| caltech101_images_test = [plt.imread(os.path.join(image_folder, "{}".format(img))) for img in images] |
| caltech101_images_transformed = [transform(img) for img in caltech101_images_test] |
| ``` |
| |
| Helper function to run batches of data |
| |
| |
| ```python |
| def run_batch(net, data): |
| results = [] |
| for batch in data: |
| outputs = net(batch) |
| results.extend([o for o in outputs.asnumpy()]) |
| return np.array(results) |
| ``` |
| |
| |
| ```python |
| result = run_batch(net, caltech101_images_transformed) |
| ``` |
| |
| |
| ```python |
| plot_predictions(caltech101_images_test, result, categories, TOP_P) |
| ``` |
| |
| |
| <!--notebook-skip-line--> |
| |
| |
| **Great!** The network classified these images correctly after being fine-tuned on a dataset that contains images of `wrench`, `dolphin` and `lotus` |
| |
| <!-- INSERT SOURCE DOWNLOAD BUTTONS --> |